Bluestream is a Dutch company active in the subsea and offshore sector, specializing in remotely operated underwater vehicles (ROV), diving, and industrial rope-access services.
Bluestream's ROVs are made by Saab Seaeye, the world's largest manufacturer of electric underwater robotic systems. They are robust and reliable pieces of equipment. The embedded electronics that control the vehicles are housed in waterproof boxes that tolerate pressures up to 2,000 msw. However, the ROV system itself lacks system diagnostics to inform the operator of the ROV's status (power supplies, voltages, currents, temperatures, etc.), which is useful to know when having to control or look for faults in the ROV system.

Bluestream's remotely operated underwater vehicle
At the end of 2017, Bluestream implemented a system for the monitoring and control of remotely operated underwater vehicles. The system is called MonitoROV.
The goal was to create a SCADA interface with a PLC built into the existing electronics housing. Due to a lack of space, an Arduino-based PLC card – communicating via Modbus – was developed in-house by Bluestream. The motivation for using Reliance SCADA was this article.
The finished product now displays the following information to ROV operators:
In addition, it stores all critical values in graphs and databases.
At the moment, the items listed above are purely for visualization, but when the hardware deems reliable, Reliance will also be used to control:
The system runs on a 2-wire RS-485 network with two slaves. The network channel uses fiber optic cables and is intended solely for communication with Reliance.
The entire system is under development and will expand in the near future.

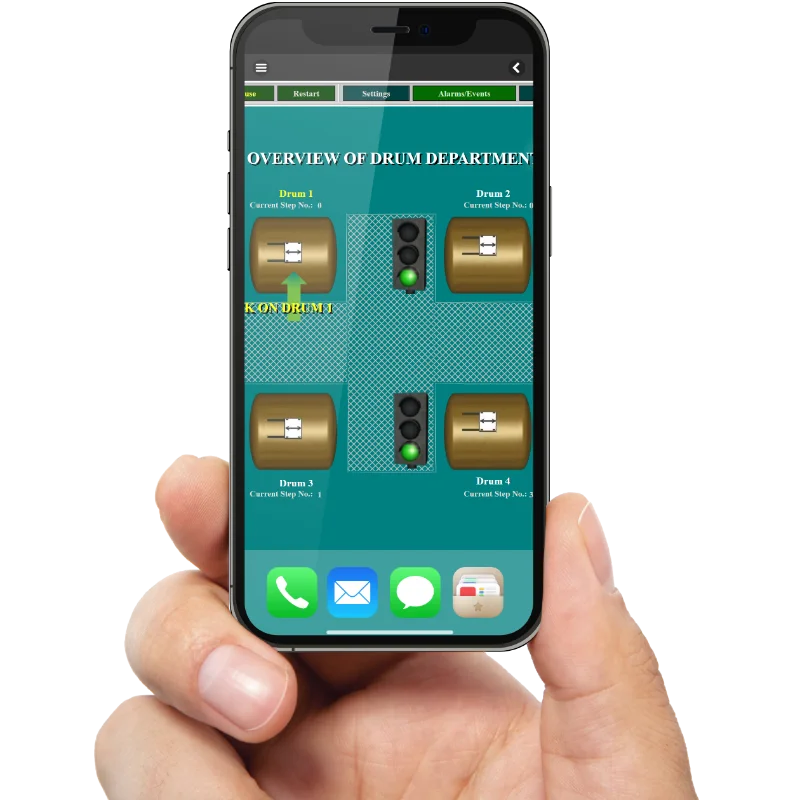
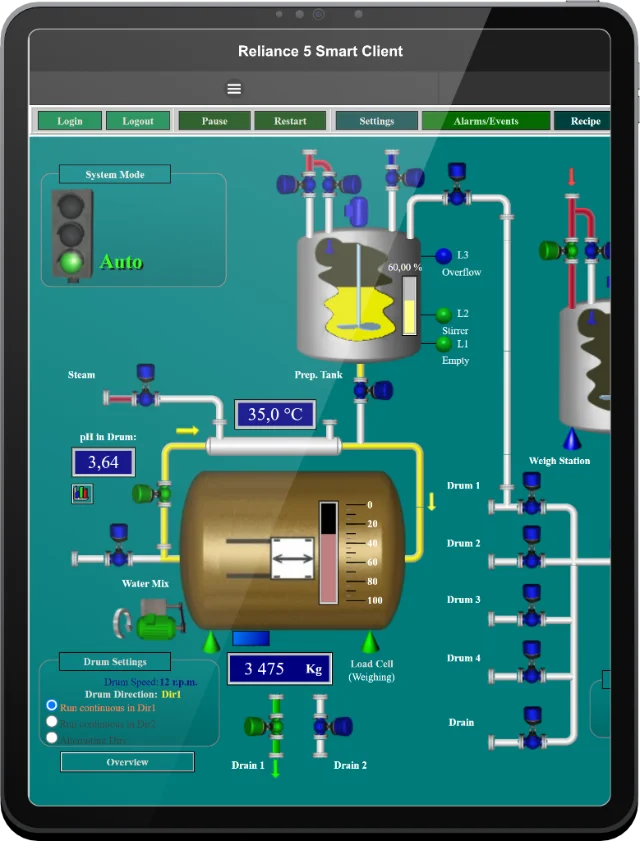
The main visualization window

Visualization of the accelerometer
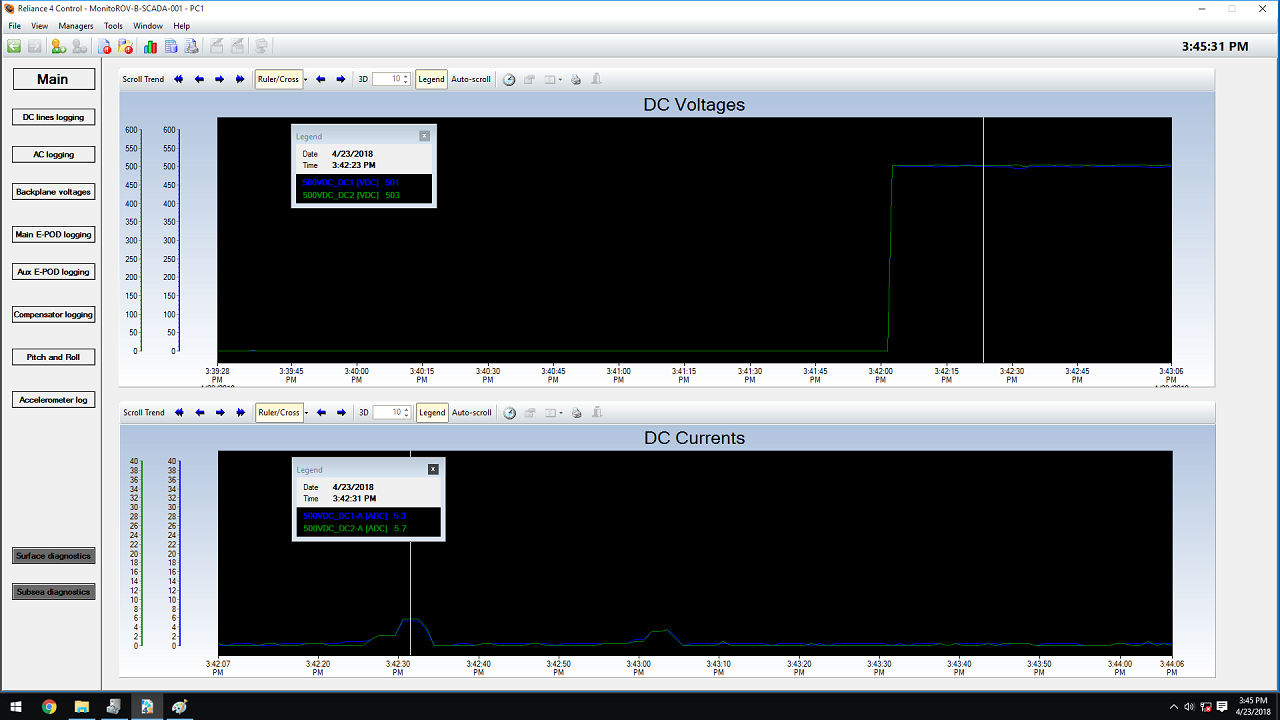
Voltage and current trends

Subsea diagnostics
The main visualization window
Visualization of the accelerometer
Voltage and current trends
Subsea diagnostics
Country:
Title:
Implemented by:
Year:
Control system:
SCADA software:
If you have any questions, please feel free to email or call us.
Phone:
Info:
Sales:
Suppor:
Phone:
Info:
Sales:
Support:
Phone:
Info:
Sales:
Support:
GEOVAP
Cechovo nabrezi 1790
530 03 Pardubice
Czechia
© 2026 GEOVAP | Terms of Use and Privacy Policy | Cookie preferences | Write to us